1、应用领域
智能助老助残机器人属于康复医学工程领域,是一门多学科交叉的新兴边缘学科,所涉及的专业领域包括机械、控制、计算机、材料学、康复医学等。
2、成果简介:
智能助老助残机器人本体设计部分,根据智能助老助残机器人实际工作以及自由度的要求,在满足人机友好、共融的基础上,设计了一种适合护理工作的智能助老助残机器人系统工作方案,对机器人的关节驱动进行分析,使用MATLAB软件,结合相应算法,对机器人的重力矩平衡机构进行优化计算,求得各构件最佳尺寸以及安装位置。其次,结合3D打印设计理念,利用SolidWorks软件建立三维模型,运用D-H参数法,结合Motion插件对机器人进行运动学分析与动力学分析,为驱动电机以及各零件的选型提供理论依据。
控制系统与算法设计部分,针对助老助残机器人非结构化的工作环境,提出了一种利用双目立体视觉系统进行空间随机目标定位的方法,借助人工神经网络所具有的对不完整信息独特的参数映射能力、快速并行信息处理能力和多输入多输出的非线性特性,建立起一种特殊的多自由度机器人关节空间参数求解模型。其次,设计了一套包括主控制器、随机目标定位跟踪系统、语音命令信号采集系统、手部姿态自平衡控制系统和电源系统的智能助老助残机器人控制系统。
双目视觉空间定位研究与实现部分,对Bumblebee2相机进行了二次开发,通过位于受助者头部的激光笔指引的方式来指定目标,对光斑进行图像检测与处理,采用重心法求取光斑中心在图片中的位置,采用OpenCV提供的Haartraining算法训练得到人脸分类器和人嘴分类器,实现了对指定的任意目标物体的空间三维定位以及对受助者嘴部的空间三维定位。
手部抓取自平衡功能设计,分析了智能助老助残机器人手部自平衡功能的实现原理,选用二阶毕卡法对四元数微分方程进行求解用以更新姿态四元数,并采用梯度下降法对陀螺仪误差进行修正,得到了机器人手部精确的实时姿态。根据姿态角对关节舵机进行控制,实现了智能助老助残机器人手部自平衡的功能。
以上四个部分均在智能助老助残机器人系统中进行了具体的实验验证与分析,并且制造了一台满足任务书要求的智能助老助残机器人实用样机。
3、经济效益与应用前景分析:
我国从2000年开始就已经进入了老龄化社会,根据2016年最新数据统计,我国60岁及以上老年人口约23749万人,占人口总数的16.8%。与此同时,我国残疾人口总数已然达到了8600万,约占人口总数的6.3%。第二次全国残疾人抽样调查数据显示, 2006 年我国残疾人人口数约占全国总人口数的 6.34%,肢体残疾占 29.07%。沿用 06 年残疾人所占的比例,预计到 2050 年年底,我国人口总数达到 13.44亿,残疾人总数将达到 8521 万人,其中肢体残疾人数大约为 2477 万,助老助残机器人的市场需求日益扩大。但是残疾人生活所需的辅助护理器具的供应总量为152.4万件,仅占残疾人口总数的1.8%,而老年人生活所需的辅助/护理器具更是有限。越来越多的老年人和残疾人不仅增加了个人和家庭的负担,同时还对国家的医疗和社会保障系统造成了巨大的压力。因此解决老年人和残疾人的生活护理问题,是一件利国利民的大事,也是建设小康社会全面发展的必然要求,已经成为了我国当下迫切需要解决的一大社会问题。
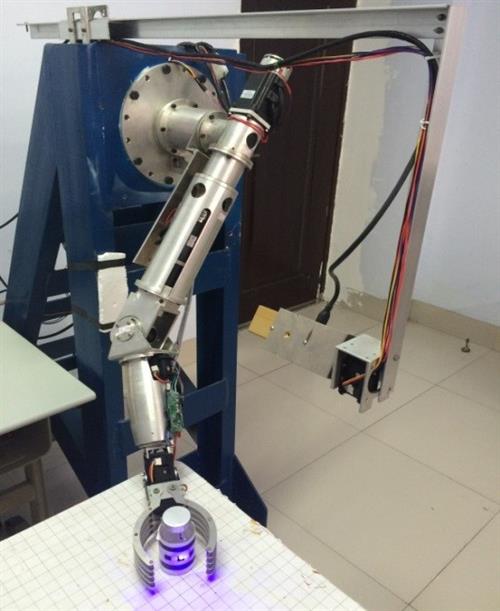
智能助老助残机器人
联系人姓名:王传江副教授
单位:山东科技大学
联系电话:0532-80681104
电子邮箱:cxjwang@163.com